引言
制动性能对车辆的主动安全影响比较大,故随着车辆研发进程的加快,制动系统也在不断进行技术革新 .近来自动驾驶技术日益发展,作为易于实现的线控液压制动系统(Hydraulic Brake-by-Wiresystem, HBW)以其结构简便、可控性能优越、响应快速、卓效节能的工作方式而得以深入研究[1].
作为一种新型的线控制动系统,线控液压制动系统摒弃了复杂庞大的液压管件,在工作时 ECU收集各路传感器信号,通过电磁阀将制动液从高压蓄能器输入轮缸,以此得到期望的目标压力[2]. 在工作过程中制动力跟随的良好动态特性对目标压力起到十分积极的作用 . 当前已有大量学者对HBW 系统及其动态响应性能进行了研究 . 都灵理工大学D’alfio等通过研制HBW试验台架,对HBW系统的重要部件如高压蓄能器,高速开关阀等进行了深入的研究,分析了各个零部件的工作特性[3].LiXiaoping 等设计 DDEHB 新型线控制动系统,以提高车辆的制动性能[4].李静等通过自行开发的电控制动试验台,将制动测试程序写入 Code warrior 软件中进行典型工况的增压、保压、减压试验,获得了系统在典型制动进程中的压力动态性能[5].陈慧岩等通过静态试验测试线控液压制动系统响应特性,并在某越野车上搭建实车系统,进行了电控制动实际道路试验,研究其响应特性和可控性[6]. 金智林等分析 HBW 系统的工作原理,搭建线控液压制动系统的力学模型,通过自行研制的 HBW 试验台架对模型进行了相关的制动试验,验证了所建模型的正确性 ;应用建立的 AMESim 模型详细分析了HBW主要结构参数及制动液的特性参数对压力动态响应的影响[7]. 张鸿生等建立了 HBW 系统的理论模型,并通过AMESim建模仿真验证理论模型的准确度,并针对典型工况对 HBW 系统的关键参数进行了分析[8].韩正铁等提出了商用车电子制动系统关键部件的动态迟滞特性及补偿控制策略,利用硬件在环试验验证了控制策略的有效性[9].王琳琳等根据重型商用车的电控气压制动系统提出制动力 分 配 算 法 ,采 用 硬 件 在 环 试 验 对 算 法 进 行验证[10]
重型车由于在制动过程中具有较大的惯性,因此大部分采用气压制动释放制动力,但为了克服气压式制动结构的响应速度慢的问题,也有部分重型车采用液压式制动结构 .其中,吴春红等对重型车辆的气-液复合制动系统的控制策略进行研究,用试验台验证仿真结果的正确性[11];陈姗姗等面向具有制动动态特性延迟的重型装备运输车,对行车制动系统和液力缓速器进行了建模和仿真分析[12].而重载卡车、轮式装载机、井下铲运机、平地机以及集装箱搬运机等实现了液压制动的功能.
本文采用大流量的电磁比例阀设计了重型车线控液压制动系统;根据 HBW 的工作原理及数学模型搭建了 AMESim 仿真模型;用 HBW 试验台架进行缓慢制动和反复紧急制动等典型工况的测试;并用测试数据对模型进行对比验证,分析重型车电子液压制动过程中的响应特性.
1 HBW系统构架及原理分析
图 1 为 1/4 的重型车 HBW 系统的组成构架示意图,由电子控制单元模块、液压控制单元模块、电子制动踏板模块等三个模块构成.电子式制动踏板含有制动力传感器及制动力矩传感器,其作为电子制动踏板模块的主要部件,通过采集电子踏板的电压信号,将制动信号传输给电子控制单元,ECU 则将制动电压信号转变为对应的PWM波形输出控制电磁比例阀,通过阀芯位移,控制油液的输出.
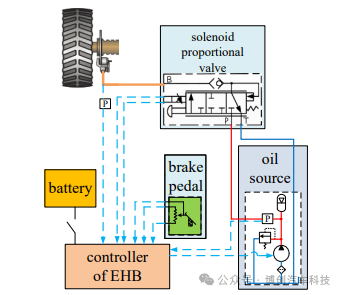
图1 重型车线控液压制动系统组成示意图
液压控制单元包括储液油箱、液压泵、电动机、单向阀、过滤器、溢流阀、高压蓄能器、电磁比例阀轮缸压力传感器及蓄能器压力传感器.液压控制单元接收 ECU 的信号,通过继电器控制电机泵的工作状态,完成蓄能器的充液过程 .根据电磁比例阀的比例输出特性,HBW 可完成线性增压、保压、线性减压的过程 . 随着电子踏板的行程不断增大,ECU把制动信号转变为PWM输出控制电磁比例阀阀芯的左向位移,制动液从高压蓄能器通过电磁比例阀进入制动轮缸,此为增压过程 .当电子踏板的电信号维持一定值时,电磁比例阀维持一定的开度,使得单位时间内进入轮缸的油液流量与流向油箱的油液流量相同,此为保压过程 .当电子踏板的电信号减弱时,电磁比例阀的阀芯右位移动,轮缸内的制动液流向油箱,制动压力减小,此为减压过程.
2 HBW系统模型
2.1 HBW系统主要部件模型
根据重型车线控液压制动系统的工作原理,分别对增压、减压过程中的主要部件——高压蓄能器、电磁比例阀及轮缸等进行建模.
(1)高压蓄能器
在 HBW 增压时,蓄能器内的制动液流向制动轮缸,此时蓄能器内的油液减少,气体内能增加,将气室体积的增加近似为绝热膨胀过程[13],蓄能器在增压过程中的关键参数的变化满足泊松方程

式中,p1为电磁比例阀处于中位时蓄能器充液增能后的气压,V1为电磁比例阀处于中位时蓄能器充液增能后的气室体积,p2为电机泵未给蓄能器充液时的气压,V2为电机泵未给蓄能器充液时的气室体积,n为热力学绝热指数.
考虑制动液的流速对蓄能器充液进程的影响,可以计算出制动液均值流速和蓄能器的实时压力之间的关系式

式中,pg为蓄能器的实时压力,qr为给制动轮缸增压过程中的液压油流动的均值速度 . 图 2 为 AMESim中的高压蓄能器模型.

图2 高压蓄能器模型
(2)电机泵
高压油源模块的电机通过继电器接收直流电源输送过来的电信号,并通过电子控制单元检测蓄能器的压力使其保持在一定范围 .在制动增压时,蓄能器内的制动液进入制动轮缸,蓄能器的实时压力下降到设定值,液压控制单元控制继电器接通,电机泵开始工作,将制动液泵入高压蓄能器,蓄能器内的实时压力升高至设定值,继电器切断电信号,电机泵由于接收不到 ECU的信号而停止工作,期间泵的输出流量

式中,Q0为液压泵的输出流量,S0为电机的转速,V0为液压泵单位时间内的排量,E0为制动液的体积模量,c0为液压泵的压力因子,Pi为液压泵的输入口的压力,P0为泵的输出口的压力.图3为AMESim中的电机泵模型.

图3 电机泵模型
(3)电磁比例阀
在制动过程中,通过电子踏板中的传感器将控制信号输入给电磁比例阀的通电螺线管,通电螺线管的端电压[14,15]

式中,ui为电子踏板中的输出电压,L为电磁比例阀内每个线圈的电感,I为进入电磁比例阀的电流,Rs为阀内每个线圈的电阻,Ke为动生反电动势系数,se为铁磁体的位移.电磁比例阀中的电磁铁具有比例特性,电磁铁作为将电转换成机械位移的元器件,其通电后在磁场中受到电磁力的作用,通过克服弹簧力等力的作用,将接收到的电信号转换成位移,控制阀芯移动.在规定的工作区间内,电磁力

式中,Ki为电磁比例阀中的电流-力增益.
电磁比例阀的阀芯在规定的工作区间做水平运动的同时会受到多个力的作用,包括电磁力、摩擦力、弹簧力、惯性力及液动力.根据牛顿运动定理

式中,pb为作用于制动钳的制动力,A为销钉端面的面积,Ma为电磁阀阀芯组件的等效质量,Ba为等效阻尼系数,sv为电磁比例阀的阀芯位移,Kv为回位弹簧刚度,sv1为阀芯处于中位时的压力口至油箱口的开口长度,Kv为液动力的刚度系数 . 电磁比例阀[16]在其工作时的动态性能类似于单向阀[17],由此得出电磁比例阀的流量动态特性方程

式中,Qh为流经电磁比例阀的油液流量,Ci为油液流量系数,Ai为油箱口至压力口的开口面积,ρ为油液的密度,Pb为制动轮缸压力.图4为AMESim中的电磁比例阀模型.
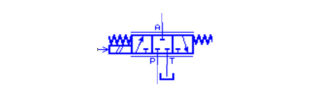
图4 电磁比例阀模型
(4)制动轮缸
制动过程中,制动液由油管处流向制动轮缸,考虑制动液的流速对蓄能器充液进程的影响,进入轮缸的制动液流量变化及轮缸的实时压力变化情况满足以下关系式

式中,K 为制动液的体积弹性模量,Vs为油管体积 .图5为AMESim中的制动轮缸模型.

图5 制动轮缸模型
由以上可得,HBW 增压过程的动力学微分方程

HBW减压过程的动力学微分方程

2.2 HBW系统模型
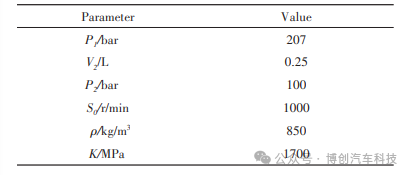
AMESim(Advanced Modeling Environment forSimulation of engineering systems)作为专门用于液压及气压系统的建模平台,采用了液压及气压图标符号代表系统中的各个模块及元件,因此适用于汽车制动系统的建模与仿真研究 .分析 HBW 系统的自身架构原理及相关参数在 AMESim 软件建立相应模型 .图 6为线控液压制动系统模型 .其中 HBW模型中各个部件的主要特征参数如表1所示.

图6 线控液压制动系统模型
表1 HBW系统参数
3 HBW系统控制
从图 6 可以看出,HBW 系统包含蓄能器压力控制模块和轮缸压力跟随控制模块.
3.1 蓄能器控制
液压控制单元基于预先设定的压力值,通过继电器对电机泵进行工作过程的控制.图7为蓄能器控制流程图.电子控制单元通过控制继电器的通断决定电机泵的工作状态.由于蓄能器充液压力上限的存在,压力波动大且充液速度快,设置蓄能器的压力区间位于工作压力下限值和工作压力上限值之间,当蓄能器从电机泵充液至其压力大于工作压力下限值时,电控单元控制继电器关闭电机,停止充液;当蓄能器充液至其压力小于工作压力下限值时,电控单元控制继电器启动电机充液至压力达到工作压力上限值.
3.2 制动压力控制
轮缸压力调节过程采用 PID 控制器 .PID 控制器根据实际制动压力与目标期望压力的差值调节输入电信号作为控制器输入,经控制器输出至线控液压制动系统的电磁比例阀

其中,ΔP为制动目标压力与实际制动压力的差值,调节控制控制器的比例系数 Kp = 4.5 × 10-4,积分系数 KI = 5.5 × 10-4,微分系数 KD = 1 × 10-8. 经过PID 控制器对制动目标压力与实际制动压力差值的控制,HBW 系统可以理想地按照期望的制动力输出压力.
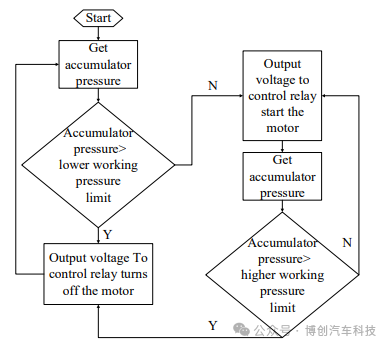
图7 蓄能器控制流程图
图8为轮缸压力的控制算法流程图.
轮缸压力控制过程包括数据的采集处理和控制输出.轮缸压力传感器将压力对应的电压信号经过 AD模块转换输入电子控制单元,电控单元对数据进行均值滤波等处理得到目标压力与实际压力的差值,用PID控制器控制误差至实际压力越来越接近于目标压力,并计算输出的PWM信号.

图8 轮缸压力控制算法流程图
4 HBW系统试验验证
4.1 HBW试验台架
根据 HBW 系统的工作原理,研制出相应的试验台架,对HBW模型进行验证.图9为试验台架的控制原理图.根据HBW系统的架构原理,由电源模块供电,控制单元接收压力传感器的信号,通过电压驱动模块输出控制给执行机构,并将相应的数据反馈给计算机显示.

图9 HBW台架控制原理图
图 10为 HBW 试验台架实物图 .根据系统的控制流程,设计控制代码并通过 Code warrior 软件编写进电子控制单元,完成数据的转换、采集及控制输出工作.

图10 重型车HBW试验台架实物图
4.2 HBW系统结果及验证
为验证建立的模型及控制算法的有效性,选用几种典型的制动工况,分析其制动系统动态特性,结果如图11-15所示.
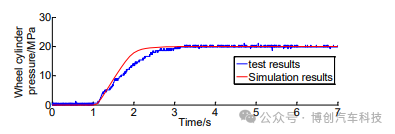
图11 缓慢制动工况
11 为重型车缓慢制动工况,制动踏板从零位移到最大位移时的制动压力.可以看出,HBW系统在增压过程中,仿真结果与试验测试结果吻合,其中轮缸压力稳态值误差小于 2%,压力从 0 缓慢上升至最大值时间约1.6s,仿真模型由于忽略了油管软管的变形特性,到达最大值时间超前 0.5s. 因此HBW系统满足重型车缓慢制动的要求.

图12 缓慢减压工况
图 12 为模拟汽车缓慢松开制动的工况 . 可以看出,在减压过程中,仿真结果与试验结果的稳态值非常吻合,二者的结果均可在3.5s内降至0MPa,与重型车减压过程中的标准相一致 .因此,所建立的模型能较好地反应实际HBW系统工作过程.

图13 缓慢增、保、减压工况
图 13 为重型车典型的制动工况:增压、保压、减压.在三个阶段中,仿真结果响应速度理想,可控性较强 .在增压阶段,试验结果由于踏板信号的不稳定,导致电磁比例阀的开度速率变化较快.
图14为模拟汽车中度制动和中度松开制动过程中轮缸制动压力的变化.可以看出在连续的两个增压和两个减压过程中,仿真和试验结果均较吻合.在减压时,轮缸压力响应延迟了0.5s左右,对于重型车线控液压制动过程的动态性能来讲,可以接受0.5s的减压误差,故其动态性能符合期望.
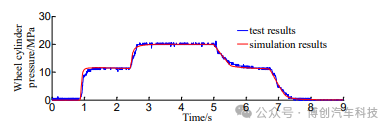
图14 中度增、保、减压工况
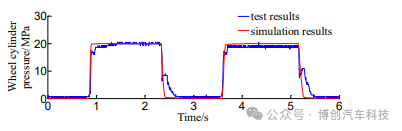
图15 紧急增、保、减压工况
15 为模拟汽车频繁快速紧急制动工况 . 在两个紧急增压工况下,仿真结果可以很好地跟随制动信号进行制动,且在达到最大压力前后,基本呈现出了线性的特点.试验结果显示第一次达到最大压力之前,轮缸压力由于蓄能器的储液能力不足,最后的充液速度放缓,虽然不能及时达到目标压力,但仅比仿真结果延迟了 0.4s,认为动态特性良好;第二次达到最大压力之前,轮缸压力由于蓄能器充液延迟,增压时间较第一次短,但并未达到目标压力,误差为 0.5MPa,认为可以达到目标压力 .两次的快速松开制动的过程在前期拟合得很好,后期处于小压力状态,油管存在压力损失,受残余压力的影响,试验结果在时间上延迟了 0.3s. 整体上体现出了HBW系统在制动过程中的响应快速和可控性强的特点.
5 结论
为分析重型车线控液压制动系统的动态性能,根据 HBW 的工作原理,搭建了 1/4 车 HBW 系统的AMESim 模型,并用自行研制的试验台架进行试验验证.结果表明,仿真模型与试验结果非常吻合,验证了模型的准确性.HBW系统在增压、减压过程中均体现出了较好的响应特性,整个过程中无压力超调现象,可控性强,HBW 系统动态性能优越,适用于重型车的各个制动工况,实用性强.
针对重型车线控液压制动系统动力学分析与控制,以下是我的回复:<br><br>重型车线控液压制动系统在车辆主动安全中扮演重要角色。该系统采用先进的ECU和传感器技术,能迅速精确地控制制动液压力。在实际应用中,通过对动力学特性的深入分析,我们可实现更佳的制动力跟随目标压力,确保制动效果达到最优。此外,我们还需对该系统的控制策略进行深入研究,以提高重型车辆的行驶安全性。总的来说,线控液压制动系统具有广阔的应用前景,值得继续探索和优化。
针对重型车线控液压制动系统动力学分析与控制,以下是我的回复:<br><br>制动性能对车辆主动安全至关重要。线控液压制动系统因其结构简洁、控制性能优异而备受关注。该系统通过ECU收集传感器信号,经电磁阀精准控制制动液传输,实现快速响应与高效节能。其动态特性对于目标压力的精准跟随至关重要。为提高制动性能,需深入分析线控液压制动系统的动力学特性,优化控制策略,确保系统在不同工况下均能表现出优异的制动效果,为车辆的主动安全提供坚实技术支撑。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>重型车辆的线控液压制动系统对于提升主动安全性至关重要。此系统摒弃了传统复杂结构,通过ECU收集传感器信号,精准控制电磁阀,迅速调整制动液压力。对于其动力学分析,需深入研究压力传输的实时响应、系统稳定性及制动力分配的精准性。控制策略应确保在各种路况和驾驶模式下,系统均能迅速、准确地响应,以实现最佳的制动效果与行车安全。未来研究方向可聚焦于复杂环境下的系统鲁棒性和安全性优化。<br><br>该系统是自动驾驶技术中的关键技术之一,其深入研究与应用对于推动自动驾驶技术的进一步发展具有重要意义。
针对重型车线控液压制动系统动力学分析与控制,以下是我的回复:<br><br>重型车线控液压制动系统在车辆主动安全中扮演重要角色。此系统通过收集传感器信号,利用电磁阀精确控制制动液从高压蓄能器至轮缸的传输,实现期望的目标压力。在动力学分析中,需深入研究制动力与目标压力的动态特性,确保系统在实际工作过程中具有良好的跟随性和稳定性。此外,对于系统的控制策略,应充分考虑各种工况和传感器信号的融合,提高制动精度和响应速度,确保车辆的行驶安全。<br><br>以上内容仅供参考,具体分析和控制策略还需结合实际情况和专业知识进行深入研究和探讨。
针对重型车线控液压制动系统动力学分析与控制,该制动系统具有结构简便、可控性能优越等特点。其动力学分析主要关注制动力跟随目标压力的动态特性,包括压力传输、响应速度及精度等方面。控制方面,需深入研究电磁阀、传感器及ECU等关键部件的协同作用,确保系统在各种工况下均能准确、快速地响应目标压力。此外,为提高制动性能,还需对系统参数进行优化设计,并进行严格的测试验证。总的来说,重型车线控液压制动系统在动力学分析与控制方面仍需深入研究,以确保车辆主动安全性能的提升。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>重型车辆的线控液压制动系统对主动安全性能至关重要。该系统通过ECU收集传感器信号,利用电磁阀精确控制制动液从高压蓄能器到轮缸的传输,实现目标压力的快速响应。在动力学分析中,我们深入探讨了制动力与目标压力之间的动态特性,确保制动过程的精确性和稳定性。针对重型车辆特殊的工作环境及负载条件,我们进行了详尽的仿真与实地测试,确保系统的可靠性及优越性。此系统的应用将显著提高重型车辆的制动性能,为驾驶者提供更加安全、舒适的行车体验。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>重型车辆的线控液压制动系统对于提升主动安全性至关重要。该系统通过ECU收集传感器信号,精确控制电磁阀以调节制动液压力,实现对目标压力的快速响应。针对其动力学特性,我们需深入分析制动力与目标压力之间的动态关系,确保系统在实际工作过程中具备优良的跟随性能。此外,对于重型车而言,系统的耐久性和稳定性尤为重要。建议采用先进的控制策略,如模糊控制、神经网络等,以应对复杂工况下的挑战。未来的研究方向可包括系统优化、故障预测与诊断等,以确保线控液压制动系统在重型车辆中的安全、高效应用。<br><br>希望以上回复可以帮助到您。
以下是对“重型车线控液压制动系统动力学分析与控制”的回复,以汽车工程师的专业角度进行分析:<br><br>重型车线控液压制动系统的动力学分析是车辆主动安全性的关键。此系统通过ECU收集传感器信号,经电磁阀精确控制制动液压力,实现快速且精确的制动力调节。针对其动力学特性,我们需要深入分析制动力跟随目标压力的动态响应,包括压力建立速度、精度及稳定性。此外,系统控制策略应考虑多种工况下的适应性,如不同路面、载荷及车速条件。通过仿真与实验验证,确保制动性能满足重型车辆的安全需求。 <br><br>希望以上内容对您有所帮助。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>针对重型车辆线控液压制动系统,其动力学特性分析与控制至关重要。制动性能直接影响到车辆主动安全。线控液压制动系统通过ECU收集传感器信号,经电磁阀精准控制制动液压力,实现快速响应与高效节能。在复杂工况下,系统动力学分析需考虑多种因素,如传感器信号准确性、电磁阀响应速度、制动液压力波动等。为确保制动效果与行车安全,需对系统进行深入研究和精确控制。后续研究中,建议进一步优化算法,提高系统响应速度与稳定性,并加强在实际车辆上的试验验证。 <br><br>希望以上回复对您有所帮助。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>重型车辆的线控液压制动系统动力学分析与控制是实现主动安全技术的重要部分。此系统摒弃复杂液压结构,通过ECU收集传感器信号,经电磁阀精准控制制动液传输,以实现目标压力。在实际应用中,该系统的动力学特性确保了优良的制动力跟随性和响应速度,对于提升车辆安全性能具有重大意义。对目标压力的良好跟踪与实时调整是此系统的核心,它使得重型车在各种路况和环境下都能实现精确、稳定的制动。进一步的动力学分析和控制策略的优化,将促进此技术在重型车领域的广泛应用。<br><br>希望以上回复可以帮助到您。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>重型车辆的线控液压制动系统对车辆主动安全至关重要。此系统摒弃传统复杂结构,通过ECU收集传感器信号,精确控制电磁阀以传递制动液,实现快速响应与高效节能。其动力学特性表现为优秀的动态响应与制动力跟随目标压力的良好性能。在分析和控制过程中,需关注传感器信号的准确性、电磁阀的响应速度及高压蓄能器的压力稳定性。为确保系统性能稳定,建议进行实际路况测试,持续优化软硬件设计,以提高重型车的制动精度与安全性。<br><br>针对线控液压制动系统的研究与应用,我们还应关注其在实际运行中的可靠性、耐久性以及与其他车辆系统的协同工作问题。通过深入研究与实践,推动线控液压制动系统在重型车辆领域的广泛应用。
以下是针对“重型车线控液压制动系统动力学分析与控制”帖子的专业回复:<br><br>重型车辆的线控液压制动系统对于提升主动安全性至关重要。该系统通过ECU收集传感器信号,精确控制电磁阀以调节制动液压力,实现对目标压力的快速响应。动力学分析表明,此系统具有良好的动态特性,能确保制动力跟随目标压力的变化,从而提高制动精度和效能。针对重型车特点,需深入分析系统在不同工况下的性能表现,如高温、高负荷等极端环境下的稳定性。建议进一步研究优化控制策略,提升系统响应速度和稳定性,确保重型车的行驶安全。<br><br>希望以上回复对你有所帮助。
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) 重型车线控液压制动系统动力学分析与控制w9.jpg
重型车线控液压制动系统动力学分析与控制w9.jpg