在这个不断内卷的汽车行业,大家都在拼命卷价格卷配置卷功能,目前汽车的很多功能需要多个控制器联合实现,主流通讯方式仍然采用的是CAN通讯。通过CAN通讯实现各个控制器(ECU)之间信息交互,比如网络唤醒功能,最开始主动唤醒源唤醒某个ECU,然后该ECU再通过CAN特定帧发送网络管理报文给相关的各控制器,以此实现某个功能的唤醒场景。
source: 纯电动汽车DCDC唤醒系统及唤醒方法与流程在之前文章:
CAN矩阵和DBC里有哪些隐藏信息?(qq.com)一文了解CAN矩阵与DBC文件 (qq.com)
已经介绍了在OEM层面对CAN通讯所需要做的工作,这些工作往下传递到各个控制器系统,通常会输入给ECU系统工程师,这时正式进入CAN通讯落地的第二阶段。
1 ECU系统会收到哪些CAN通讯需求
OEM输入给ECU系统CAN通讯的需求会涉及以下几个点:
首先是最基本需求,ECU需要具备几路CAN,是否要支持CAN FD;每路CAN的传输速率和采样点要求,波特率是否需要支持可标定;
然后是CAN通讯矩阵开发需求;
其次是与功能安全相关的E2E保护需求;
最后是CAN网络管理需求。
这些需求都是目前ECU CAN通讯开发的通用需求,按照汽车控制器研发的标准V流程,这些需求称为客户需求或者利益相关者需求Stakeholder requirement,对应Aspice的SYS.1层级。因此,从研发流程上来说,在ECU系统层面,系统工程师收到这些需求后,会拉上相关利益者一起来评估这些需求,包括硬件,软件,功能安全和项目经理等项目内部成员,同时也会和客户多次对齐,一方面明确需求所需实现的内容,另一方面明确需求释放的软硬件版本和时间节点。
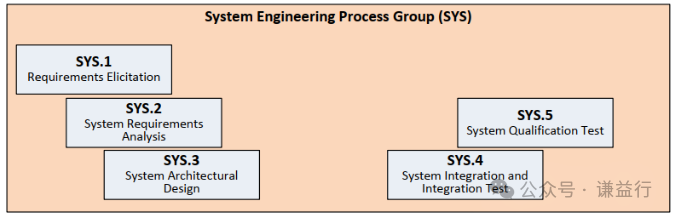
source: Automotive Software Process Improvement and Capacity Determination
在SYS.1阶段,ECU系统工程师的作用可大可小,取决于其对CAN通讯的掌握程度。那在ECU系统层面需要掌握到什么程度?以及具体需要掌握哪些内容?接下来基于输入的CAN通讯需求继续从ECU系统层级角度来探讨,ECU系统工程师该如何去理解与评估这些CAN通讯需求。这里先放上ECU系统工程师的交付物,即Aspice的SYS.2 系统需求,对于CAN通讯这块有:
ECU需要具备两路CAN,一路CAN用于ECU之间的通讯,根据已提供的CAN通讯矩阵或DBC进行开发;另一路CAN用于诊断通讯和XCP标定,满足ISO14229和ISO15765,以及XCP协议;
两路CAN都支持CAN FD,且仲裁段波特率为500Kbps,采样点为75%,数据段波特率为2Mbps,采样点为80%;
E2E保护采用AutoSAR所定义的Profile1;
通讯CAN需要支持任意帧报文唤醒,以及AutoSAR NM策略。
注意不管上面这些内容有没有理解,首先先将利益相关者需求细化分解ECU系统需求很重要,因为实际工作中交付第一,其次是搞清楚,最终谁来落地,谁来交作业。当然这里想抛开这两点,回归需求本身,探究CAN通讯需求为什么或怎么分解。
2 如何理解ECU系统层级的CAN通讯需求
就ECU系统工程师的经历来说,对于每一条系统需求,一方面要理解需求本身,即,另一方面也要知道与需求相关的角色,即相关利益方。
ECU需要具备两路CAN,一路CAN用于ECU之间的通讯,根据已提供的CAN通讯矩阵或DBC进行开发;另一路CAN用于诊断通讯和XCP标定,满足ISO14229和ISO15765,以及XCP协议。
解析:使用两路CAN的主要考虑因素有:总线负载率和产品功能需求等,因此,OEM定义一路用作ECU通讯,比如底盘域总线挂上XYZ,、EPB、CDC和IEB等;OEM定义另一路用于诊断通讯和标定功能。然后这里涉及的标准协议有几个,其中,ISO14229定义了诊断通讯的内容与方式,ISO15765定义了CAN通讯的单帧与多帧的通讯方法,XCP协议定义了上位机如何与ECU进行通讯交互。有了这些认识之后,那么对于这条需求的评估考虑有:
ECU硬件是否足够数量的接插件Pin以支持提供两路CAN_H和CAN_L,以及PCB是否有足够的大小来布置CAN收发器及其处理电路;微控制器MCU的CAN控制器是否足够。

由此可见,这条需求的关键点与硬件相关,硬件满足后,再考虑软件。
两路CAN都支持CAN FD,且仲裁段波特率为500Kbps,采样点为75%,数据段波特率为2Mbps,采样点为80%;
解析:此需求需要考虑两个方面:
一是ECU硬件,CAN收发器和MCU都需要支持CAN FD;二是ECU软件,CAN通讯协议栈支持CAN FD报文处理。
主要工作量在软件,但是在测试验证时,注意配置正确的波特率和采样点:
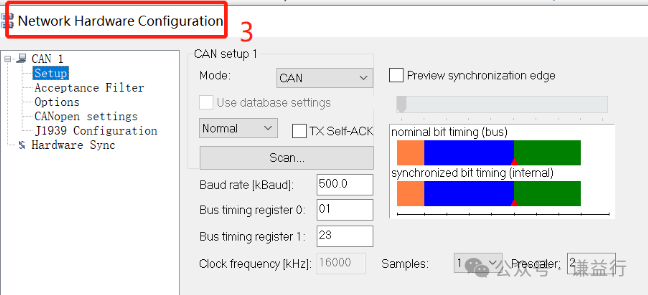
source:Vector - CAPL - CANoe硬件CAN&CANFD参数_canoe设置波特率这里对波特率/速率稍作解释;CAN FD采用了两种位速率:从控制场中的BRS位到ACK场之前(含CRC分界符)称为数据段速率,如上图蓝色部分,其余部分仲裁段速率,它俩可以分别设置不同的波特率和采样点。
E2E保护采用AutoSAR所定义的Profile1;
解析:E2E策略的整体思路是CRC校验和计数,在原始数据的基础上增加控制段形成E2E报头,AUTOSAR提供了多种E2E的配置来适用各种场景,E2E Profile 1的配置如下:
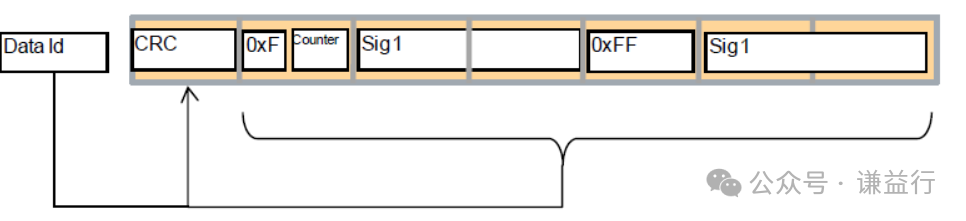
E2E Profile 1中发送到RTE的数据需要包含3个部分:4个bit的计数器,8个bit的CRC以及原数据。其中,计数器每发送一次值就加1;对Data ID、Counter和原数据进行CRC计算,并将结果填入CRC字节。这里对计数和CRC校验稍作解释:
CRC是用来判断CAN报文传输过程是否会出现错误,报文的发送方采用特定的CRC校验算法计算一条报文的CRC校验码,再将该校验码放到该报文数据中,与报文中的其他信号一起发送到CAN总线。然后报文的接收方会读取到该校验码,同时采用相同的Checksum校验算法计算出CRC校验码,再对比这两个校验码,如果一致,则说明报文传输过程没有出现错误,否则认为报文传输过程有误,这条报文有问题。Counter是用来判断报文传输过程是否出现丢帧,报文的发送方发送一条报文就计数器加1,从不断累加,然后不断循环。如果出现计数器不连续或首尾值不对,报文的接收方会认为丢帧。
通讯CAN需要支持任意帧报文唤醒,以及AutoSAR NM策略。
解析:这条需求明只要任意帧报文唤醒,则选用合适的CAN收发器即可;然后要求支持AutoSAR NM,那么就确定了网络管理状态机需求,不过这里仍然需要再明确NM各状态之间的跳转条件和动作,以及网络管理报文的发送要求,包括内容与时间等。
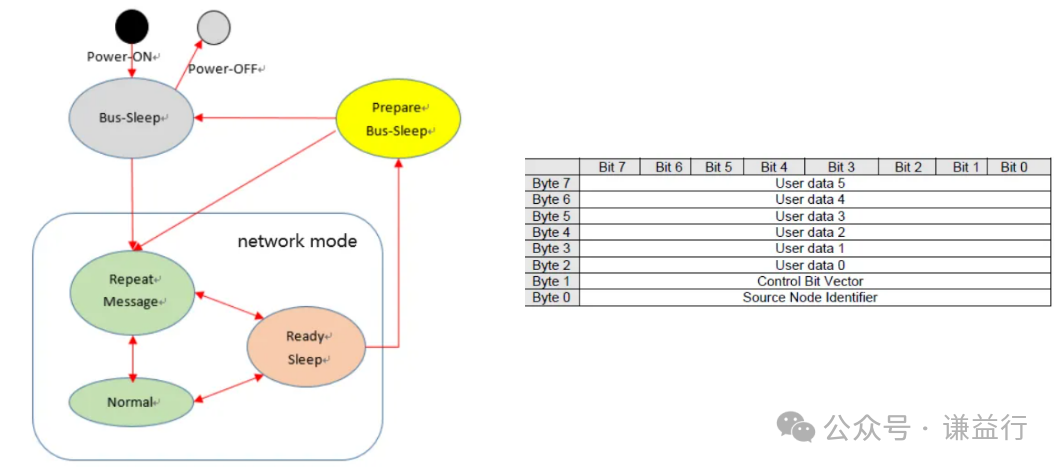
总的来说,网络管理功能通常会涉及到硬件和软件设计,另外除了上述这条需求,对于网络管理功能的实现,通常还需要唤醒场景的详细需求。
3 小结
上述大致描述了CAN通讯功能实现从OEM提出到ECU系统消化吸收,再细化,给软硬件。总的来说,最好的情况是在ECU系统层面能够进行有意义的细化成系统需求,然后在此基础上,硬件和软件分别细化成各自的需求,即硬件需求和软件需求,以此较好地将CAN通讯功能落地。
创作不易,欢迎点赞再看收藏关注!
汽车研发交流群,有兴趣的朋友请添加群主:prOmiseyes,备注:公司+职务入群。仅限汽车从业人员。
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 ) 汽车ECU系统层级的CAN通讯解析w1.jpg
汽车ECU系统层级的CAN通讯解析w1.jpg