中国汽车工程师之家--聚集了汽车行业80%专业人士
论坛口号:知无不言,言无不尽!QQ:542334618
本站手机访问:直接在浏览器中输入本站域名即可
中国汽车工程师之家--聚集了汽车行业80%专业人士
论坛口号:知无不言,言无不尽!QQ:542334618
本站手机访问:直接在浏览器中输入本站域名即可
本文不是解读规范。而是理解与场景相结合,噫在说E2E这个事情本身。可能没法直接套用,但是读完之后,你会在各种变化中都明白个大概。然后看看规范就知道怎么使用了。 从 说这么个事情,到为什么这样做,到代码简单讲解 |
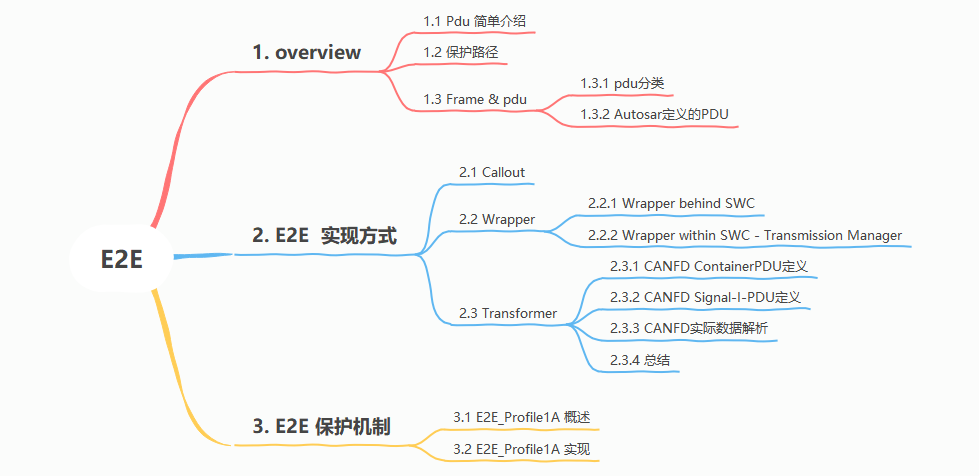
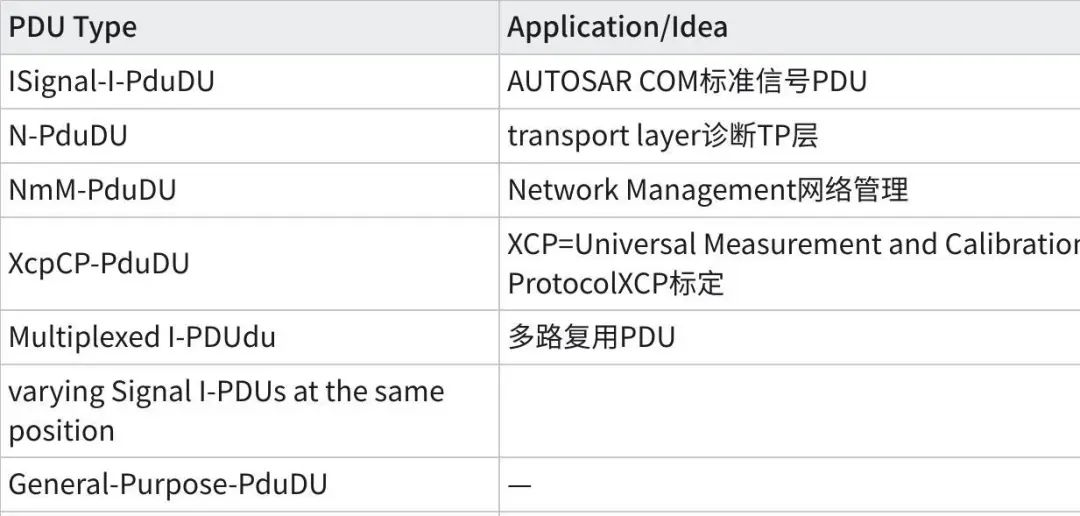
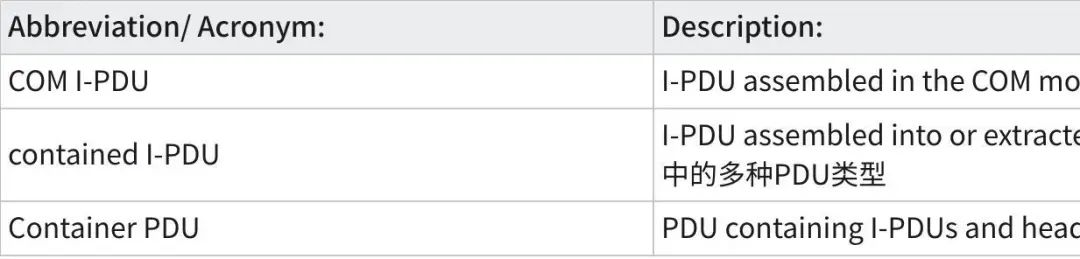
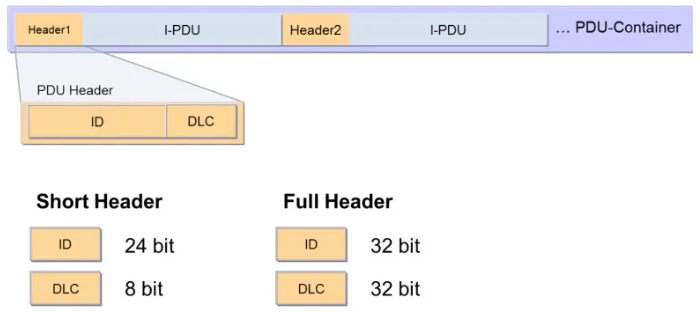
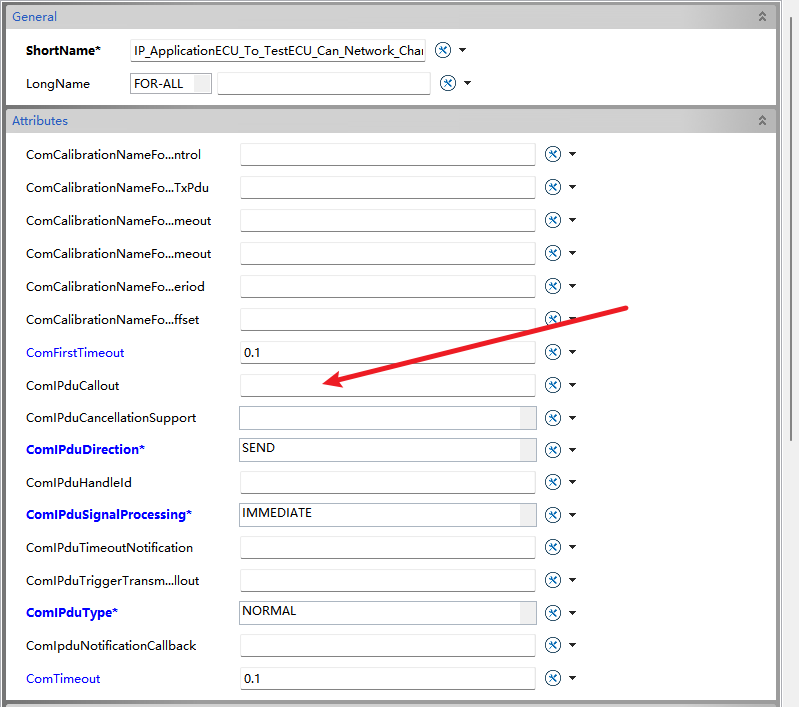
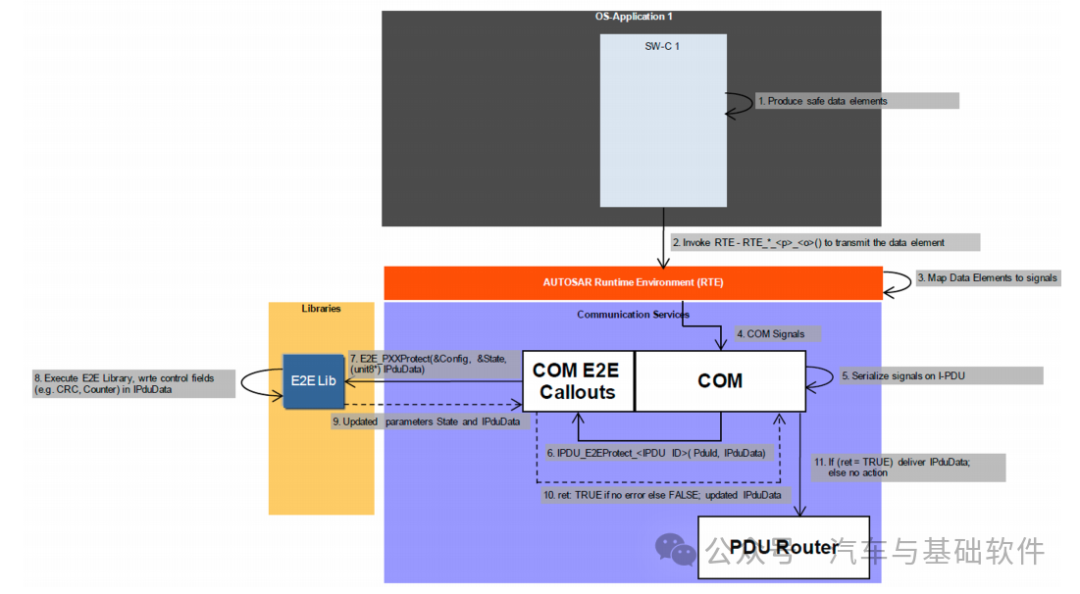
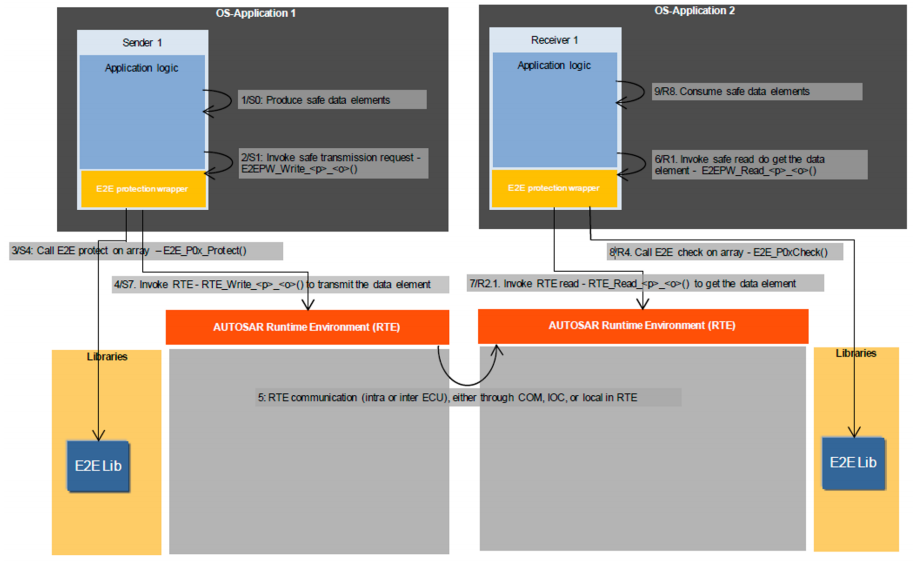
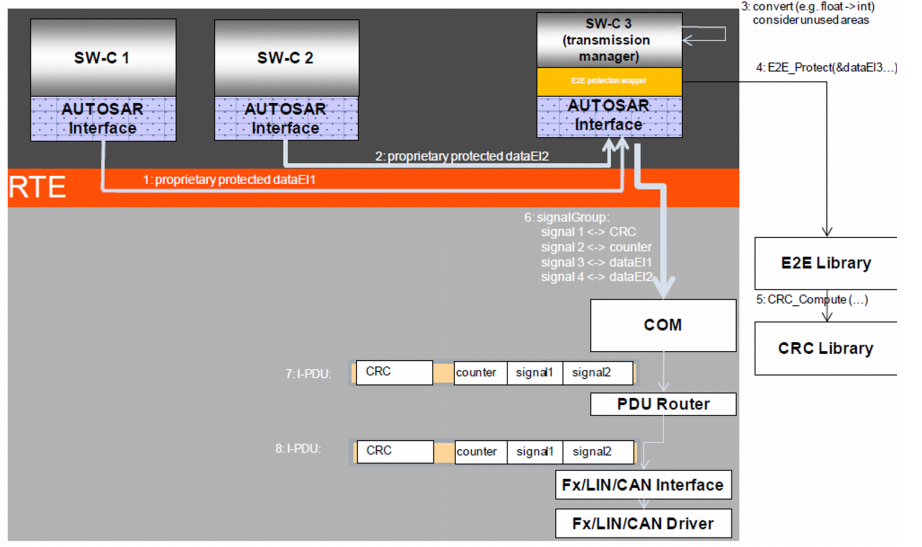
1. overview 1.1 Pdu 简单介绍 1.2 保护路径 1.3 Frame & pdu 1.3.1 pdu分类 1.3.2 Autosar定义的PDU 2. E2E 实现方式 2.1 Callout 2.2 Wrapper 2.2.1 Wrapper behind SWC 2.2.2 Wrapper within SWC - Transmission Manager 2.3 Transformer 2.3.1 CANFD ContainerPDU定义 2.3.2 CANFD Signal-I-PDU定义 2.3.3 CANFD实际数据解析 2.3.4 总结 3. E2E 保护机制 3.1 E2E_Profile1A 概述 3.2 E2E_Profile1A 实现 |




C Std_ReturnType E2E_P01Protect(const E2E_P01ConfigType* ConfigPtr, E2E_P01ProtectStateType* StatePtr, uint8* DataPtr) |
C /** @brief Protects the array/buffer to be transmitted using the E2E profile 1. * This includes checksum calculation, handling of counter and Data ID. * * @param ConfigPtr Pointer to static configuration. * @param StatePtr Pointer to port/data communication state. * @param DataPtr Pointer to Data to be transmitted. * * @return Error code (E2E_E_INPUTERR_NULL || E2E_E_INPUTERR_WRONG || E2E_E_INTERR || E2E_E_OK). */ |
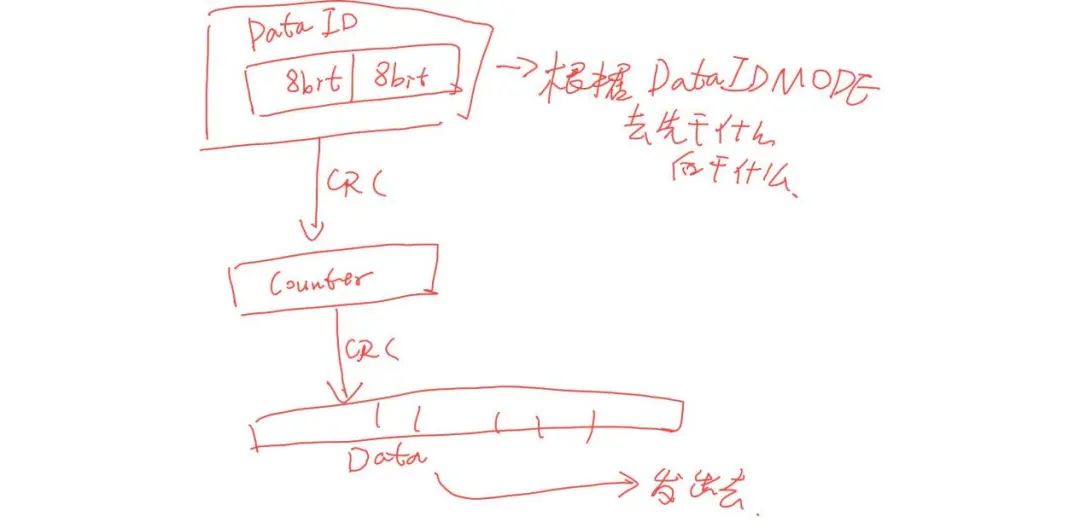
C Std_ReturnType E2E_P01Protect(const E2E_P01ConfigType* ConfigPtr, E2E_P01ProtectStateType* StatePtr, uint8* DataPtr) { Std_ReturnType status; status = E2E_E_OK; Std_ReturnType returnValue = checkConfigP01(ConfigPtr); if (E2E_E_OK != returnValue) { status = returnValue; } else if ((StatePtr == NULL_PTR) || (DataPtr == NULL_PTR)) { status = E2E_E_INPUTERR_NULL; } else { /* Put counter in data*/ if ((ConfigPtr->CounterOffset % 8) == 0) { DataPtr[ConfigPtr->CounterOffset/8] = (DataPtr[(ConfigPtr->CounterOffset/8)] & 0xF0u) | (StatePtr->Counter & 0x0Fu); } else { DataPtr[ConfigPtr->CounterOffset/8] = (DataPtr[ConfigPtr->CounterOffset/8] & 0x0Fu) | ((StatePtr->Counter<<4) & 0xF0u); } /* Put counter in data for E2E_P01_DATAID_NIBBLE */ // ASR4.2.2 if (ConfigPtr->DataIDMode == E2E_P01_DATAID_NIBBLE) { if ((ConfigPtr->DataIDNibbleOffset % 8) == 0) { DataPtr[ConfigPtr->DataIDNibbleOffset/8] = (DataPtr[(ConfigPtr->DataIDNibbleOffset/8)] & 0xF0u) | ((uint8)((ConfigPtr->DataID>>8) & 0x0Fu)); } else { DataPtr[ConfigPtr->DataIDNibbleOffset/8] = (DataPtr[ConfigPtr->DataIDNibbleOffset/8] & 0x0Fu) | ((uint8)((ConfigPtr->DataID>>4) & 0xF0u)); } } /* Calculate CRC */ DataPtr[(ConfigPtr->CRCOffset/8)] = calculateCrcP01(ConfigPtr, StatePtr->Counter, DataPtr); /* Update counter */ StatePtr->Counter = (StatePtr->Counter+1) % 15; } return status; } |

C uint8 calculateCrcP01(const E2E_P01ConfigType* Config, uint8 Counter, const uint8* Data) |
C uint8 Crc_CalculateCRC8(const uint8* Crc_DataPtr, uint32 Crc_Length, uint8 Crc_StartValue8, boolean Crc_IsFirstCall) { uint8 crc = 0; /* Default return value if NULL pointer */ #if Crc_8_Mode == CRC_8_TABLE static const uint8 Crc_8_Tab[256] = {0x0, 0x1d, 0x3a, 0x27, 0x74, 0x69, 0x4e, 0x53, 0xe8, 0xf5, 0xd2, 0xcf, 0x9c, 0x81, 0xa6, 0xbb, 0xcd, 0xd0, 0xf7, 0xea, 0xb9, 0xa4, 0x83, 0x9e, 0x25, 0x38, 0x1f, 0x2, 0x51, 0x4c, 0x6b, 0x76, 0x87, 0x9a, 0xbd, 0xa0, 0xf3, 0xee, 0xc9, 0xd4, 0x6f, 0x72, 0x55, 0x48, 0x1b, 0x6, 0x21, 0x3c, 0x4a, 0x57, 0x70, 0x6d, 0x3e, 0x23, 0x4, 0x19, 0xa2, 0xbf, 0x98, 0x85, 0xd6, 0xcb, 0xec, 0xf1, 0x13, 0xe, 0x29, 0x34, 0x67, 0x7a, 0x5d, 0x40, 0xfb, 0xe6, 0xc1, 0xdc, 0x8f, 0x92, 0xb5, 0xa8, 0xde, 0xc3, 0xe4, 0xf9, 0xaa, 0xb7, 0x90, 0x8d, 0x36, 0x2b, 0xc, 0x11, 0x42, 0x5f, 0x78, 0x65, 0x94, 0x89, 0xae, 0xb3, 0xe0, 0xfd, 0xda, 0xc7, 0x7c, 0x61, 0x46, 0x5b, 0x8, 0x15, 0x32, 0x2f, 0x59, 0x44, 0x63, 0x7e, 0x2d, 0x30, 0x17, 0xa, 0xb1, 0xac, 0x8b, 0x96, 0xc5, 0xd8, 0xff, 0xe2, 0x26, 0x3b, 0x1c, 0x1, 0x52, 0x4f, 0x68, 0x75, 0xce, 0xd3, 0xf4, 0xe9, 0xba, 0xa7, 0x80, 0x9d, 0xeb, 0xf6, 0xd1, 0xcc, 0x9f, 0x82, 0xa5, 0xb8, 0x3, 0x1e, 0x39, 0x24, 0x77, 0x6a, 0x4d, 0x50, 0xa1, 0xbc, 0x9b, 0x86, 0xd5, 0xc8, 0xef, 0xf2, 0x49, 0x54, 0x73, 0x6e, 0x3d, 0x20, 0x7, 0x1a, 0x6c, 0x71, 0x56, 0x4b, 0x18, 0x5, 0x22, 0x3f, 0x84, 0x99, 0xbe, 0xa3, 0xf0, 0xed, 0xca, 0xd7, 0x35, 0x28, 0xf, 0x12, 0x41, 0x5c, 0x7b, 0x66, 0xdd, 0xc0, 0xe7, 0xfa, 0xa9, 0xb4, 0x93, 0x8e, 0xf8, 0xe5, 0xc2, 0xdf, 0x8c, 0x91, 0xb6, 0xab, 0x10, 0xd, 0x2a, 0x37, 0x64, 0x79, 0x5e, 0x43, 0xb2, 0xaf, 0x88, 0x95, 0xc6, 0xdb, 0xfc, 0xe1, 0x5a, 0x47, 0x60, 0x7d, 0x2e, 0x33, 0x14, 0x9, 0x7f, 0x62, 0x45, 0x58, 0xb, 0x16, 0x31, 0x2c, 0x97, 0x8a, 0xad, 0xb0, 0xe3, 0xfe, 0xd9, 0xc4}; #endif /* @req SWS_BSW_00212 NULL pointer checking */ if (Crc_DataPtr != NULL_PTR) { crc = (TRUE == Crc_IsFirstCall) ? Crc_8_StartValue : (Crc_StartValue8 ^ Crc_8_Xor); #if Crc_8_Mode == CRC_8_RUNTIME crc = calculateCRC8(Crc_DataPtr, Crc_Length, crc, Crc_8_Polynomial); #elif Crc_8_Mode == CRC_8_TABLE for (uint32 byte = 0; byte < Crc_Length; byte++) { crc = Crc_8_Tab[crc ^ *Crc_DataPtr]; Crc_DataPtr++; } #endif /* Only XOR value if any calculation was done */ crc = crc ^ Crc_8_Xor; } return crc; } |
 |手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
|手机版|小黑屋|Archiver|汽车工程师之家
( 渝ICP备18012993号-1 )
GMT+8, 27-9-2024 05:54 , Processed in 0.189581 second(s), 20 queries .
Powered by Discuz! X3.5
© 2001-2013 Comsenz Inc.
 E2E实现概述w17.jpg
E2E实现概述w17.jpg